
 ImpressumWürdigungenProjekteSetupÜber MichImpressumWürdigungenProjekteSetupÜber Mich
ImpressumWürdigungenProjekteSetupÜber MichImpressumWürdigungenProjekteSetupÜber MichAls Kind habe ich ferngesteuerte Autos geliebt, und hatte wirklich viele davon. So manches davon hat leider auch ein frühzeitiges Ende ereilt, aufgrund meiner grandiosen Fahrfähigkeiten. Das Ziel war es dashalb, ein eigenes ferngesteuertes Auto zu basteln. Dieses Projekt entstand 2020 im März und April im ersten Corona Lockdown.
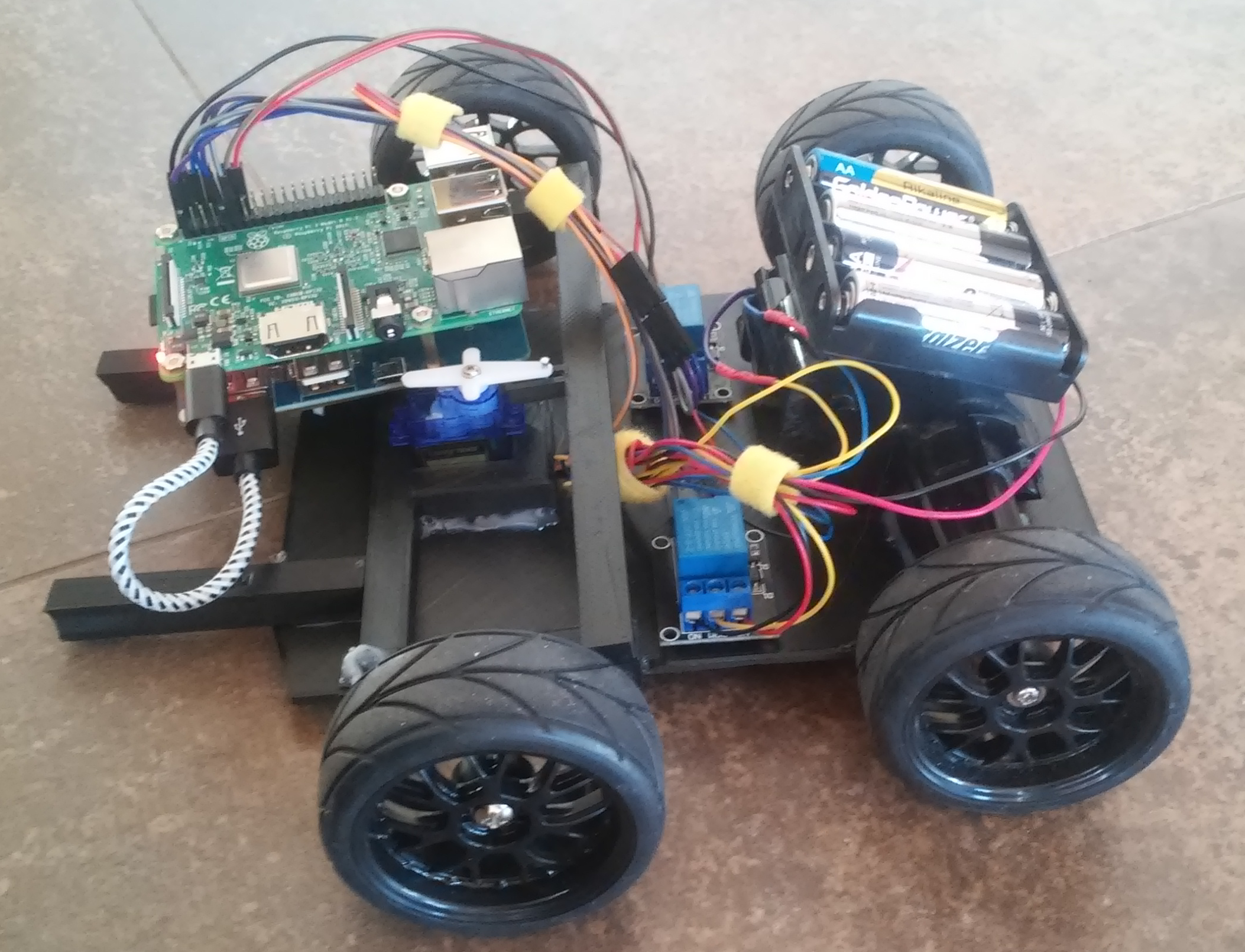
Als Steuerung von dem Ganzen sind 2 Raspberrys verbaut, es handelt sich dabei um ein Nano Modell und ein 3er Modell. Die Kommunikation der beiden Pis wurde einfachheitshalber über W-Lan realisiert.
Als Antriebsmotor wurde von einem meiner alten Spielzeugautos die Antriebsachse ausgeschlachtet. Die Herausforderung hierbei ist die Ansteuerung, da die Antribsachse, über einen 5V Analog Input angestuert wird. Der Pi hat aber nur 3V digital Output. Deshalb wurden Relais (blau) benutzt, um die Achse anzusteuern. Als Resultat kann das Auto nur stillstehen, oder Vollgas geben (vorwärts oder rückwärts).
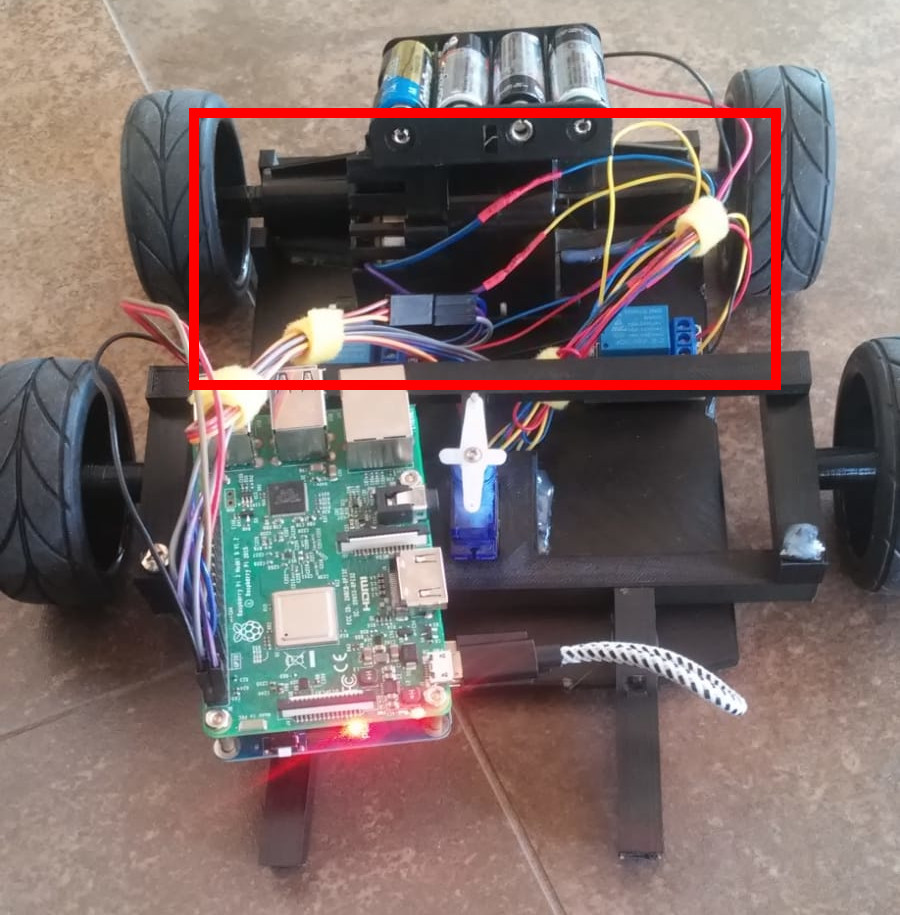

Die Lenkung funktioniert über einen kleinen Servomotor. Dieser wird direkt vom Pi angesteuert, und mit seiner Drehung verstellt er die Lenkungsachse, welche die Reifen dreht. Das Problem hierbei ist, dass die Lenkung etwas zuviel Spiel hat, und einen leichten Linksdrall. Desweiteren war die Lenkung zu gebrechlich.
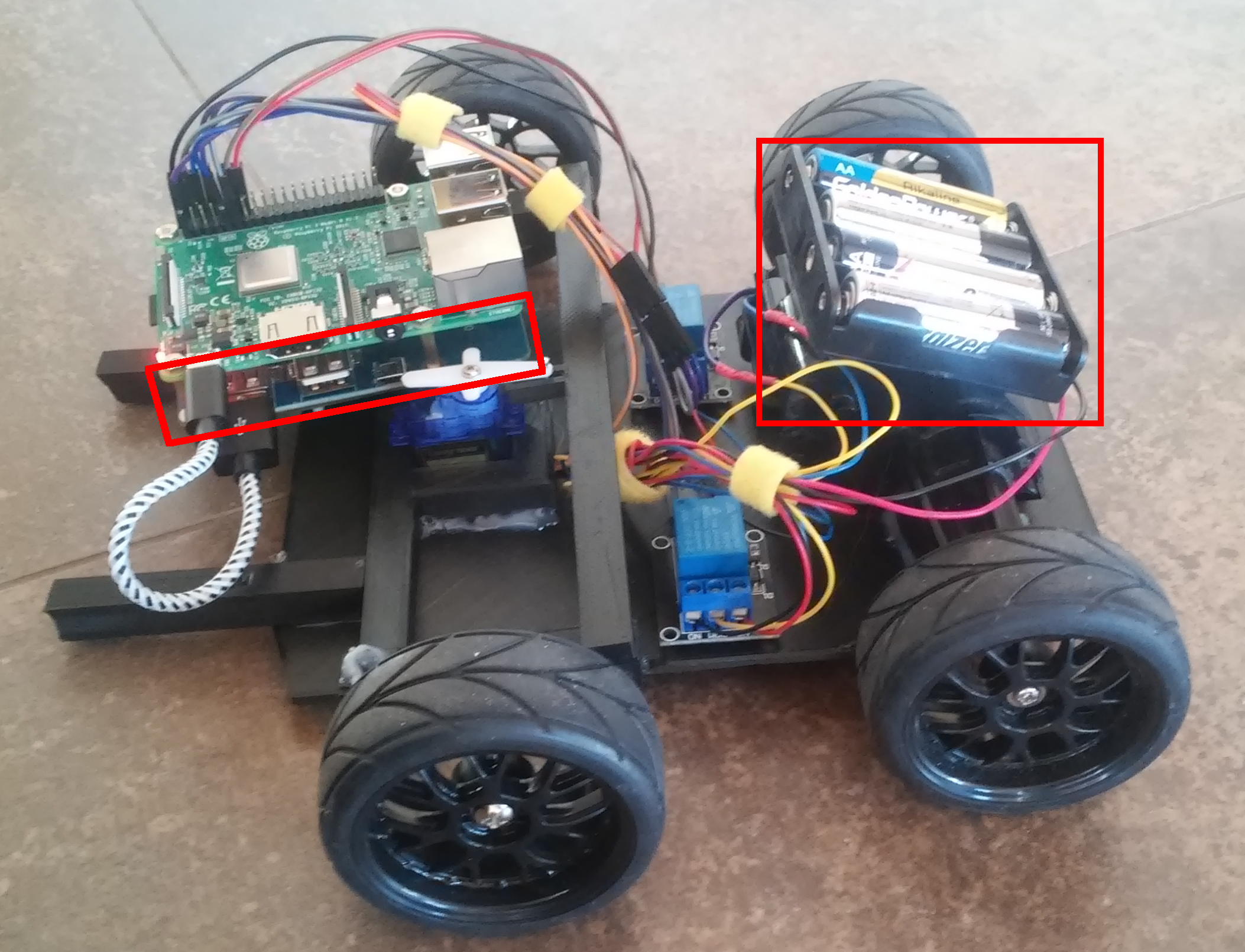
Die Stromversorgung erfolgte über 2 seperate Stellen. Ein Batteriebündel ist gut sichtbar auf dem Rücken der Antriebsachse. Der Strom davon fließt nur in den Motor hinein. Eine zweite Stromversorgung für den Pi ist unter dem Pi versteckt angebracht.

Das Fazit ist, dass meine Stoßdämpfer
nicht so gut sind, wie gehofft, und dass Drehpunkte bei Achsen nicht nur aus 3D-Gedrucktem Material sein sollten, weil diese zerbrechlich sind. Außerdem sind Raspberrypis für hardwarenahe Projekte nicht so gut geeignet, wie ein Arduino zum Beispiel.