
 ImprintShoutoutsProjectsSetupAbout meImprintShoutoutsProjectsSetupAbout me
ImprintShoutoutsProjectsSetupAbout meImprintShoutoutsProjectsSetupAbout meAs a child I loved remote controlled cars, and really had many of them. Some of them unfortunately came to an early end, due to my terrific driving skills. Therefore, the goal was to build my own remote-controlled car. This project was born in 2020 in March and April in the first Corona Lockdown.
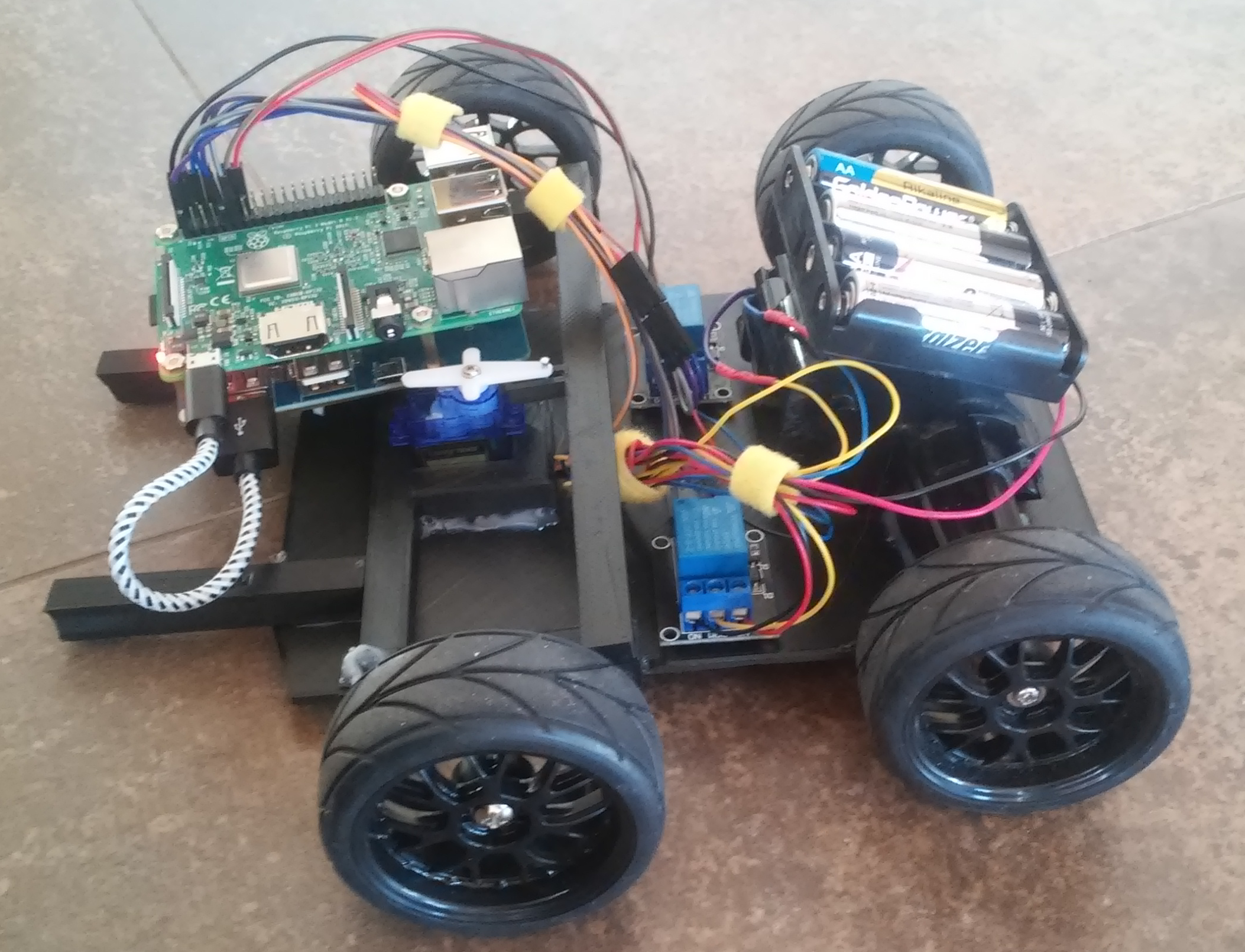
Two Raspberrys are used to control the whole thing, a Nano model and a 3 model. The communication of the two Pis was realised via W-Lan for the sake of simplicity.
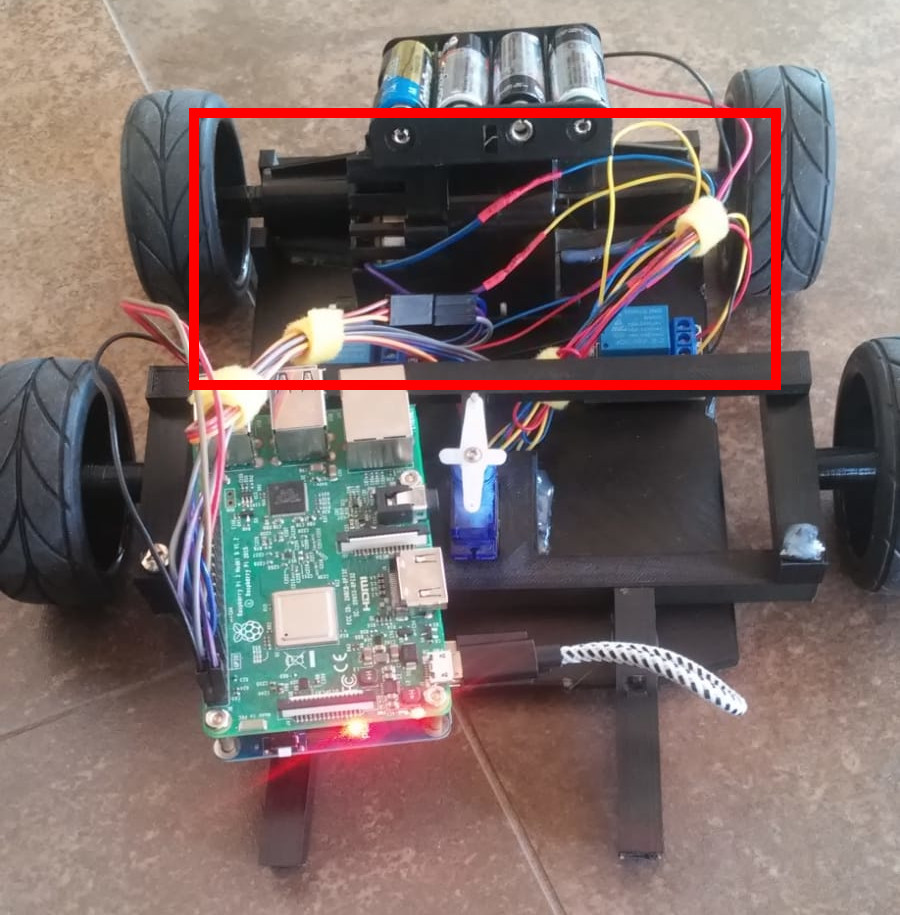
The drive motor is the drive axle from one of my old toy cars. The challenge here is the control, as the drive axle is controlled via a 5V analogue input. But the Pi only has a 3V digital output. Therefore relays (blue) were used to control the axle. As a result, the car can only stand still, or go full throttle (forward or reverse).

The steering works via a small servo motor. This is controlled directly by the Pi, and with its rotation it adjusts the steering axis, which turns the tyres. The problem is that the steering has a little too much play and a slight left-hand twist. Furthermore, the steering was too frail.
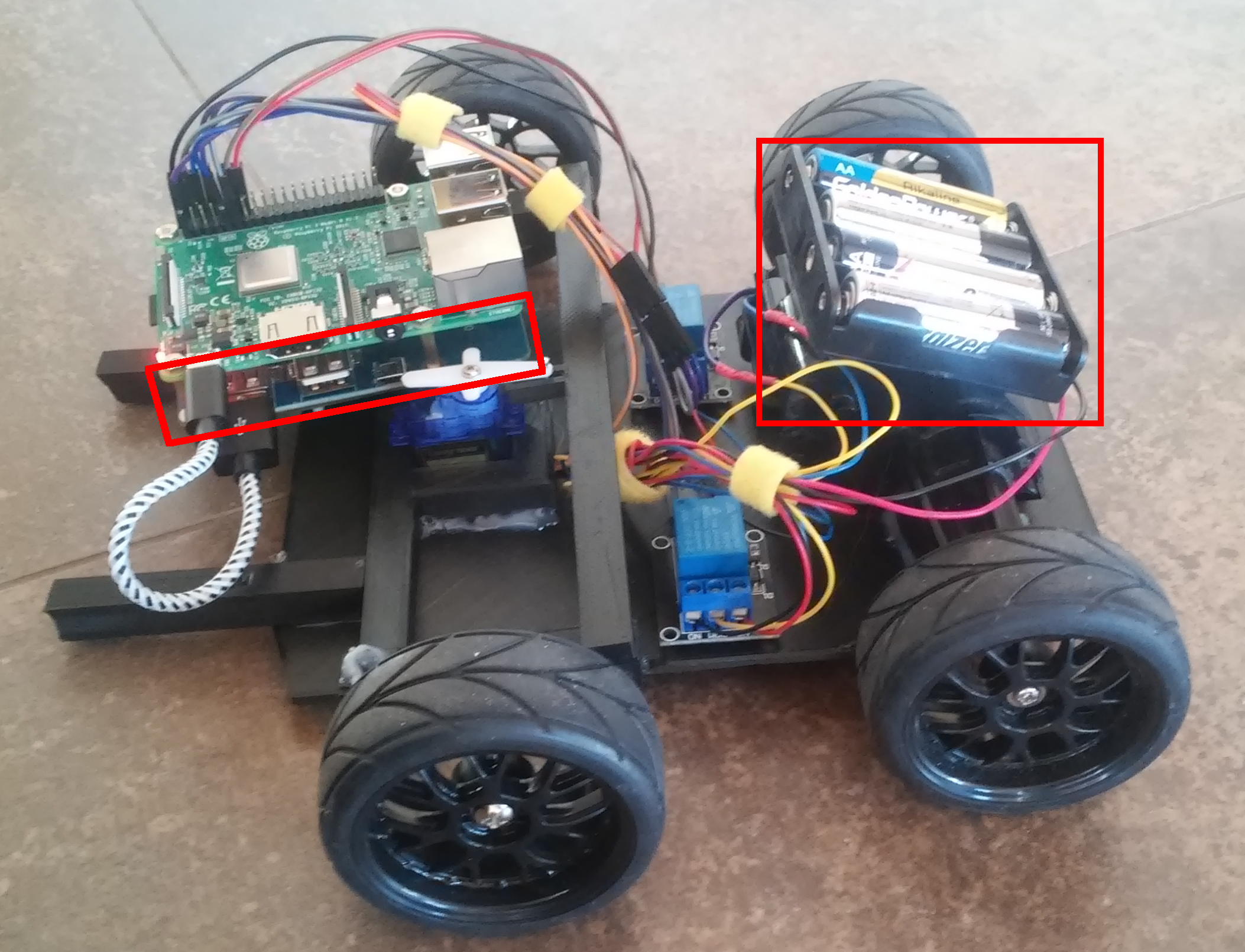
The power was supplied via 2 separate points. A battery bundle is clearly visible on the back of the drive axle. The current from this only flows into the motor. A second power supply for the Pi is hidden underneath.

The bottom line is that my shock absorbers
are not as good as I had hoped, and pivots on axles should not be 3D printed material only because they are fragile. Also, Raspberrypis are not as good for hardware-related projects as an Arduino, for example.