
 ImprintShoutoutsProjectsSetupAbout meImprintShoutoutsProjectsSetupAbout me
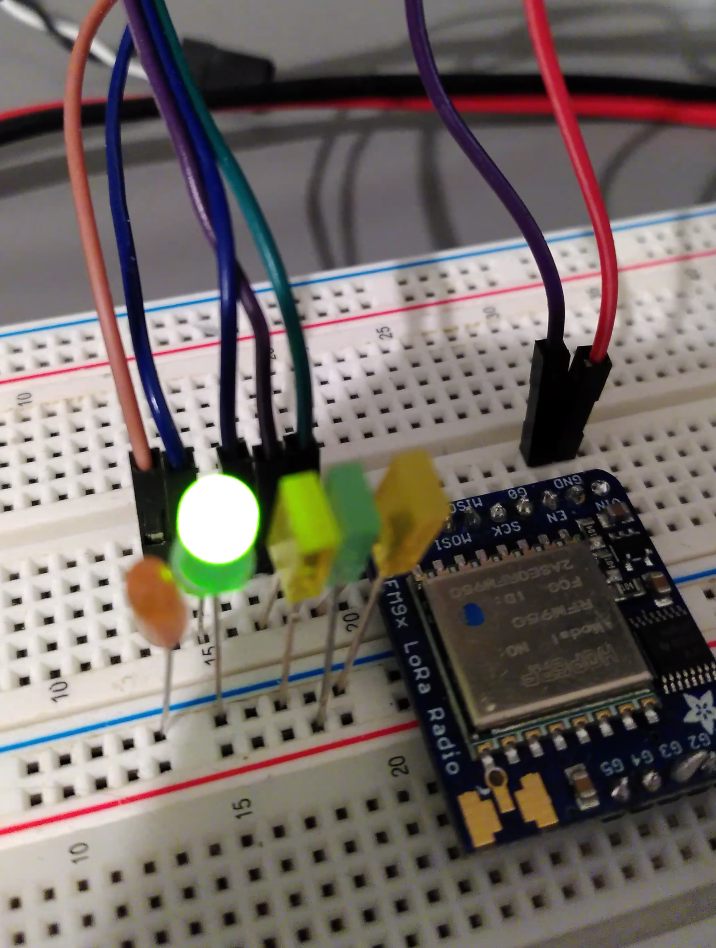
ImprintShoutoutsProjectsSetupAbout meImprintShoutoutsProjectsSetupAbout meAfter my first car, I had the idea of building a new car. Something with more power and a longer range, but that's easier said than done. First, I tackled the radio connection.
In my youthful naivety, I thought that if I bought a small radio module, I would get a better connection. That wasn't the case. After a laborious implementation, the radio connection worked, but it was far from ideal ( = crappy).
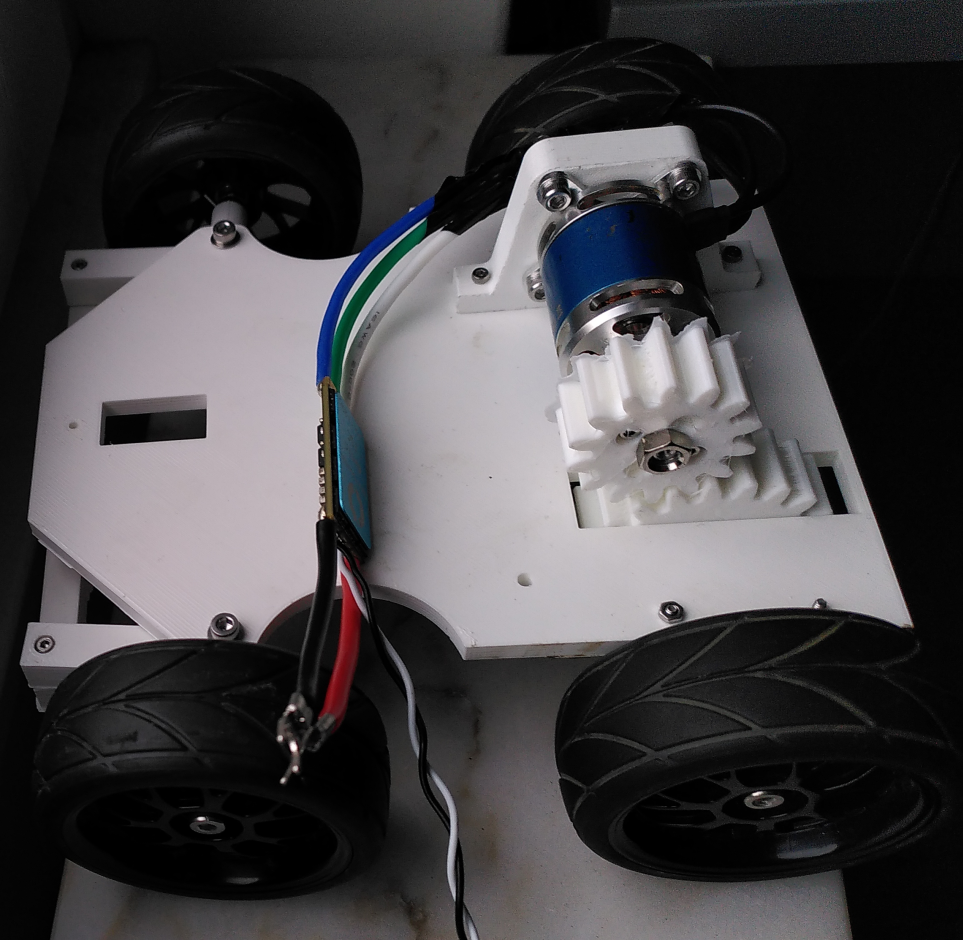
After experiencing poor radio communication, I also wanted to improve the motor, so I chose a brushless motor with ESC. However, to control a brushless motor, you need an ESC (electronic speed control), which in turn must be addressed via PWM (pulse width modulation). The motor I installed is very large and powerful and actually requires quite a bit of gear reduction, but in a preliminary version, the direct connection was sufficient.
I also opted for a new CPU for this car, namely an Arduino. It is much slimmer and more energy-efficient than a RaspberryPi, but also more difficult to program as there are no debugging options. But Arduinos are designed for projects like these.
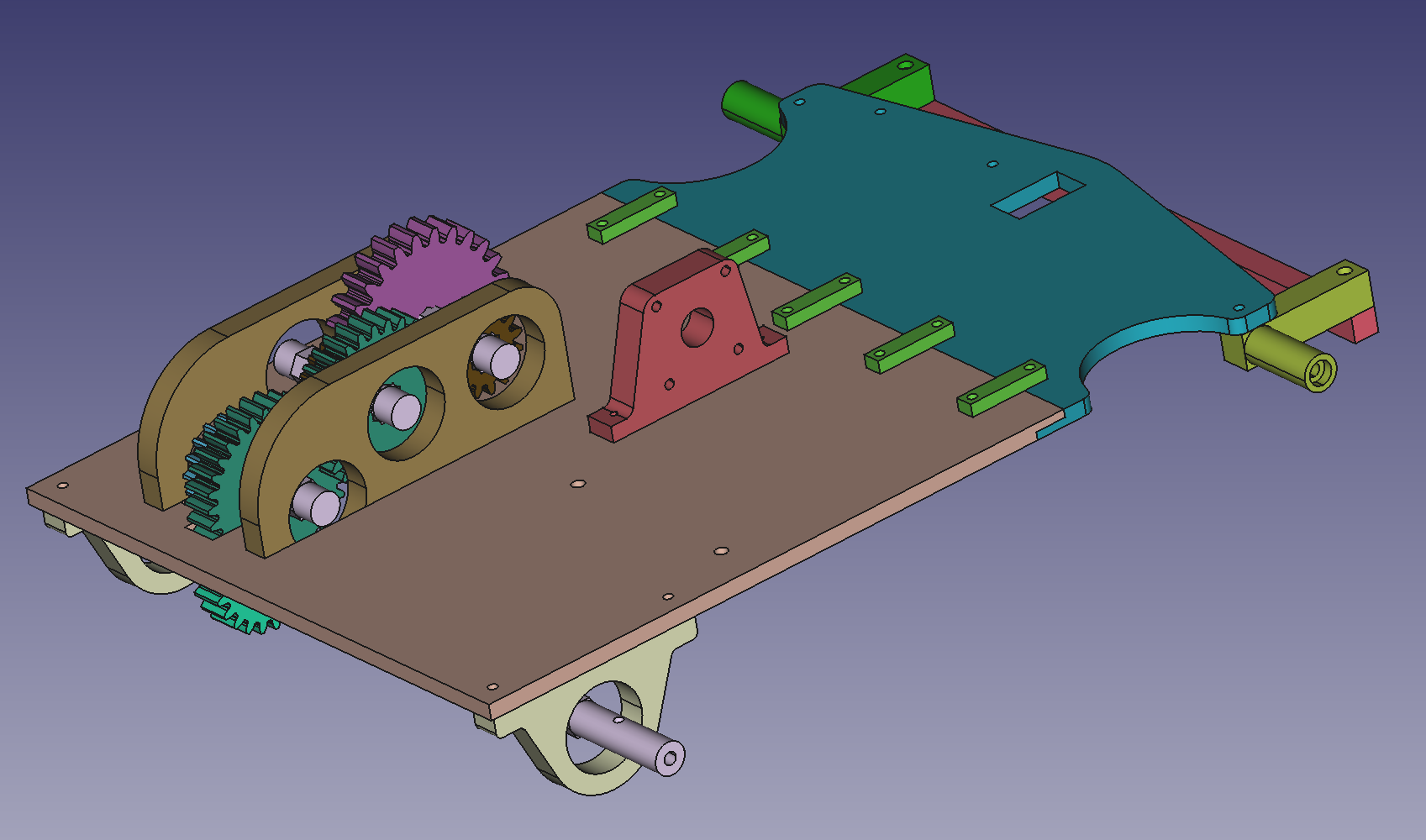
The problems with the previous version were, on the one hand, the hardware (design of the car) and, on the other hand, the radio connection. Accordingly, a complete redesign was undertaken, and a completely new car was designed. Due to 3D printer limitations, it had to be assembled from two different main plates. In addition, the tires on the first car kept spinning because the motor was too fast, so many more gears were needed.
The radio connection was also modified. A ready-made system was purchased and connected, the FlySky FS6 (similar to the picture here). The FlySky can communicate with the ESC directly via PWM, but I still connected the Arduino in between because the motor is very powerful and if you accelerate or brake too hard, the car/motor can break.


The finished car worked really well until I drove into a wall and broke the steering ;D
But apart from that, I was happy with the car. And I learned a lot about programming again, including the necessity of volatile variables when programming with interrupts.